This lab has changed since last Tuesday when it was released, if you have already cloned the repo, please pull the latest changes before preceeding. This lab is due Monday, 11/18 at 11:59PM. Please upload your final lab report to gradescope by then.
Baremetal IDE Lab
Baremetal IDE is an SDK developed and maintained by the SLICE lab at Berkeley which allows you to quickly develop C/C++ for chips developed in Chipyard. As implied by the name, Baremetal IDE focuses on providing a bunch of libraries, scripts and device drivers to build “baremetal” programs which run without an operating system like Linux or Zephyr. Programming for bare metal means that you don’t have a bunch of operating system services that you may be used to like multithreading, device drivers, dynamic linking, etc, but in return, you have full control of your code and can extract the maximum amount of performance out of your chips. Baremetal IDE provides a thin layer of drivers and libraries that handles things like malloc or print. This lets you focus on building your workloads to test your chips instead of spending your time messing with linker scripts, stdlib versions, and device drivers.
Since the actual HeatherLake setups are a bit fragile and require lots of external support equipment, we’ll be running all of these labs on an emulated chip on a Datastorm FPGA. This lab will bring you through the whole process of getting started with a new chip, building a Board Support Package, writing some basic drivers, and benchmarking a simple accelerator.
The Trenz Datastorm Board
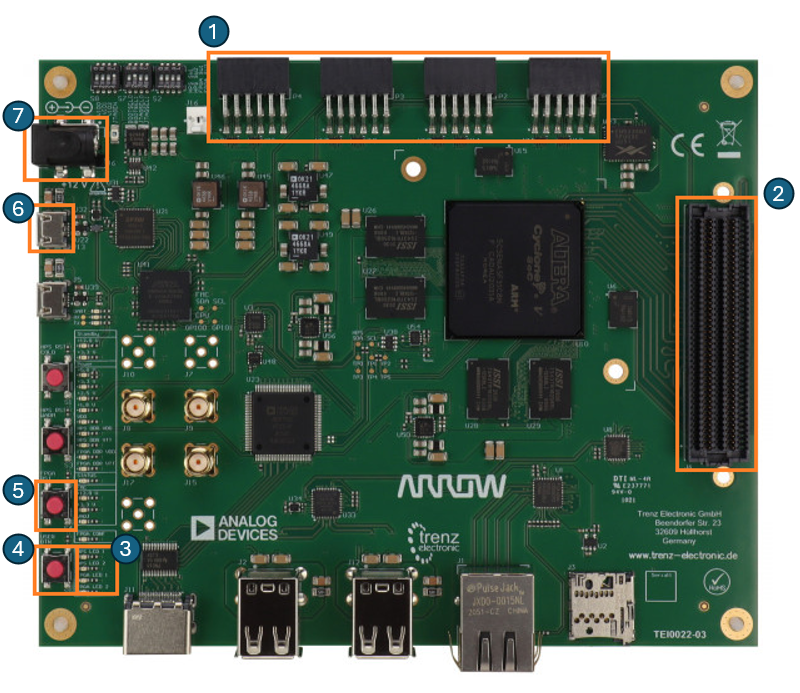
Before we begin, let’s take a closer look at the Trenz Datastorm. Since this is the standard FPGA board we will be using for the rest of the class for Bringup once the PCBs come back, it’s worth getting familiar with its functions and usage. These boards are based on the Cyclone V SoC 5CSEMA5F31 which is a chip that contains both 85K Logic Elements of FPGA fabric and two ARM CPU cores which Intel calls the Hard Processor System. These boards also come with a lot of peripherals like USB, HDMI, or Ethernet, but we’re ignoring them for now. The full board documentation can be found here but we’ve highlighted the most important parts for using the Datastorm for this lab. Since this isn’t an FPGA lab, we’ll mostly be glossing over the inner workings of the board and just touch the parts you’ll have to work with directly. Going clockwise from the top, we have:
- 4 PMOD connectors which provide 8 3.3V GPIOs each
- An FMC-LPC connector which contains 62 additional GPIOs which can connect to a daughterboard
- Two LEDs hooked up to the FPGA
- One general purpose switch,
- FPGA reset button
- A USB port for programming the FPGA and accessing a UART connection to the FPGA
- A Barrel Jack for delivering 12V DC
The Lab Bitstream
For this lab, the Datastorm FPGAs set up on the lab benches are preprogrammed to emulate a Chipyard Chip very similar to the ones that were taped out last semester and that you will be bringing up. It contains 1 Rocket core, 1 2-pin GPIO bank, 1GB of external DRAM, 1 UART, 1 UART-TSI port, a JTAG tap, and a custom addition accelerator which we will be explaining later. The JTAG and UART ports are going to a device called the FT-LINK which acts like a combination USB UART adapter and USB JTAG Adapter.
[INSERT PHOTO HERE]
Here’s how things are connected on the FPGA:
| FPGA Port | Chip Function |
|---|---|
| USB Serial | Port UART TSI |
| FPGA RST | Chip Reset |
| FPGA LED 1 | GPIO 0 |
| FPGA LED 2 | Chip Status (Always lit) |
| PMOD 1 | JTAG + UART |
| USER BTN | GPIO 1 |
And here’s a memory map of the system:
| Device | Base Address |
|---|---|
| Boot Address Register | 0x1000 |
| Boot ROM | 0x2000 |
| CLINT | 0x2000000 |
| PLIC | 0xC000000 |
| Addition Accelerator | 0x8800000 |
| GPIO A | 0x10010000 |
| UART 0 | 0x10020000 |
Setup and Navigating the BWRC Environment
Before we begin writing software for Baremetal IDE we need to set up our workspace and compiler toolchain. While you can set this up locally on your machine (see here) so you can build RISCV programs on your own machine, the documentation for how to do that is a bit out of date so the rest of this lab assumes you are using the BWRC environment.
To begin, log into a BWRC machine by either SSHing into one of the login servers like bwrcrdsl-1.eecs.berkeley.edu or by going up to one of the four workstations that are set up on benches 11 and 12 in BWRC and logging in. Then, simply source this environment file to active the Bringup Class environment and get access to all the tools you’ll need.
source /tools/C/ee290-fa24-2/ee290-env.sh
You’ll need to run this command every time you open a new terminal window so it may be worth placing this command in your bashrc so you don’t have to keep typing it in.
Now, navigate to the folder /tools/C and create a folder called your username. The entire drive mapped to /tools/C is backed up hourly and available to all machines connected to the BWRC network, including the lab benches and login servers. This means you can remotely build on one of the BWRC servers from your laptop and have the files immediately show up on the lab machines to deploy to your chip.
Once you’re in your /tools/C folder, clone a copy of the Sp24 Barmetal IDE and checkout the fa24-lab branch with the following commands:
git clone git@github.com:ucb-bar/sp24-Baremetal-IDE.git
git checkout fa24-lab
Exploring Baremetal IDE
Now that we’ve got a copy of Baremetal IDE, let’s take a closer look at all of its files and how it works. If you haven’t already, we highly recommend opening your cloned Baremetal IDE folder in a proper editor. The ee290 environment contains VSCode preinstalled which can be accessed with the command code from the terminal. Baremetal IDE is based around CMake, a meta build system that encourages modularity and makes it easy to manage lots of dependencies. CMake incredibly powerful, but that power also comes with a good deal of complexity. While this lab will attempt to explain the basics, we highly encourage you to explore CMake further as it is one of the most widely used build systems for C/C++ in both embedded and application programming. While you are here, you should take some time to get familiar with the directory structure of Baremetal IDE. Here’s a quick overview to highlight the key files:
platform/labchip
Within the platform folder, we have a bunch of folders containing chip specific files and information. For today, this will be the labchip folder. Each folder will have at minimum the five following files, though a chip may have more to support other functionality or include chip specific drivers.
chip_config.h
This file contains defines for all of the MMIO devices within a chip as well as runtime information such as the system clock frequency. You should fill this file out with defines for all the devices that are on the chip and include those devices’ driver’s headers at the top.
chip.c
A dummy file for CMake to add to include chip_config.h
CMakeLists.txt
This is the file that tells CMake to add the header file we just created to the project and defines what device drivers CMake should link. By default, this currently contains the RocketCore and CLINT drivers but you may need to add others for the rest of the lab using the target_link_libraries directive.
labchip.cfg
This file sets the configuration for JTAG debugging
labchip.ld
This is the linker script that allows us to specify where each segment of a program should go. Since we do not have a scratchpad or flash on the emulated chip, everything just goes into DRAM.
lab
This folder contains a bunch of subfolders that each contain an include and src folder that you can write program in. Each folder is setup to be its own target so you can build them individually without overwriting a previous step.
Building Blinky
The Blinky Program
To introduce the Baremetal IDE build flow, we are going start off with a blinky program which is kind of like the “Hello World” of embedded systems programming. All it will do is blink the LED attached to GPIO pin 0 at 5 Hz. This program has been simplified down to the bare minimum to make it easier to understand, ignoring all of the provided libraries and style conventions in favor of directly reading and writing to registers. We will go over cleaner, more idiomatic examples later on, but it’s important to know what’s going on underneath the hood. If you want to dig deeper into how the actual build process is handled and how all the steps of compilation fit together, Yufeng Chi from the SLICE lab has written an excellent guide here going over how to build a program from scratch without something like Baremetal IDE.
#include <stdint.h>
volatile uint32_t *GPIOA_OUTPUT_VAL = (uint32_t*) 0x1001000CUL;
volatile uint32_t *GPIOA_OUTPUT_EN = (uint32_t*) 0x10010008UL;
volatile uint64_t *CLINT_MTIME = (uint64_t*) 0x0200BFF8UL;
void delay(uint64_t ticks) {
uint64_t mtime_start = *CLINT_MTIME;
while (*CLINT_MTIME - mtime_start < ticks);
}
void main() {
int counter = 0;
*GPIOA_OUTPUT_EN = 0b1;
while (1) {
if (counter % 2 == 0) {
*GPIOA_OUTPUT_VAL = 0b1;
} else {
*GPIOA_OUTPUT_VAL = 0b0;
}
counter ++;
delay(20000);
}
}
The blinky program begins with some pointer definitions that define where all of the control registers of the GPIOs exist. Of special note is the CLINT_MTIME register which is separate from the GPIO bank. CLINT_MTIME is a register that simply counts up once every “tick” which is 1/1000 of the clock frequnecy. For us this is 40kHz which is useful for timing operations and setting delays. Next, we have a small function that uses the MTIME register to implement a small delay function, followed by our main program. Here, we simply enable pin zero’s output by writing a 1 to bit 0 of the GPIOA_OUTPUT_EN register then jump into our blink loop, either setting pin 0 high or low depending on the counter and delaying for 4,000,000 clock cycles. Since our chip is running at 40MHz, this corresponding to toggling the GPIO pin 2 times a second resulting in a blink rate of 1Hz.
Building Blinky
If you take a look at the d01 folder within lab, you should also see a CMakeLists.txt file in addition to main.c.
#################################
# Build
#################################
add_executable(blinky
main.c
)
target_link_libraries(blinky PRIVATE
-L${CMAKE_BINARY_DIR}/glossy -Wl,--whole-archive glossy -Wl,--no-whole-archive
)
This is what tells CMake that our blinky program is a program that should be built. The way you read this file the add_executable directive creates a make target called blinky with one source file, main.c and the target_link_libraries specifies that we want to link our blinky program with glossy, our libc that provides the C runtime. To actually build the executable takes two commands
cmake -S ./ -B ./build/ -D CMAKE_BUILD_TYPE=Debug -D CMAKE_TOOLCHAIN_FILE=./riscv-gcc.cmake -D CHIP=labchip
cmake --build ./build/ --target blinky
If you are using windows, you will need to add the
-G "Unix Makefiles"argument to the first CMake call so it looks like this:cmake -S ./ -B ./build/ -G "Unix Makefiles" -D CMAKE_BUILD_TYPE=Debug -D CMAKE_TOOLCHAIN_FILE=./riscv-gcc.cmake -D CHIP=labchipThis is because by default CMake on Windows generates build files for a build system called Ninja.
The first command reads all of our CMakeLists.txt files and configures the tools that actually build the project. This only needs to be run if you change a CMakeLists.txt file or you are just setting up your repository. Otherwise, the second command is sufficient. The second command actually builds the program in the build folder. If you look within your build folder, you should now have the file build/lab/d01/main.c which is our final binary.
Programming the Chip
Once we have our ELF binary of program, we now need to somehow get it onto the chip so we can see if our program wroks and show off our demos. There are two primary interfaces for programming the chip, UART-TSI and JTAG which have their own pro’s and cons. For these next steps, please be at one of the four workstations at the lab benches.
UART-TSI Programming
Our emulated chip has a UART-TSI port which is an interface that allows a computer to make TileLink read/writes by reading/writing to a UART. Normally, this would be on a separate FPGA when you are talking to a real chip but for simplicity, this lab only uses one FPGA. uart_tsi is a program that can read in an ELF binary, read the header, and issue the correct write commands to load the binary into the chip’s memory. UART-TSI has the benefit of being relatively fast and lightweight, but has the downside of requiring an FPGA to work. To begin, simply type uart_tsi in your console which displays the help screen.
Starting UART-based TSI
Usage: ./uart_tsi +tty=/dev/pts/xx <PLUSARGS> <bin>
./uart_tsi +tty=/dev/ttyxx <PLUSARGS> <bin>
./uart_tsi +tty=/dev/ttyxx +no_hart0_msip +init_write=0x80000000:0xdeadbeef none
./uart_tsi +tty=/dev/ttyxx +no_hart0_msip +init_read=0x80000000 none
./uart_tsi +tty=/dev/ttyxx +selfcheck <bin>
./uart_tsi +tty=/dev/ttyxx +baudrate=921600 <bin>
ERROR: Must use +tty=/dev/ttyxx to specify a tty
Let’s break down the arguments here
+tty=<tty> specifies what serial port the chip’s UART-TSI port is on.
Unfortunately, due to the way Unix handles serial devices, the exact device ID changes every time you unplug and replug your device. The best way of figuring out which serial port is which is unplug the device you are trying to find the id of, run the command ls /dev/ttyUSB* to lists out all remaining USB serial ports, plug the device in again, and run the command one last time to find the new serial port. For the lab, UART-TSI is on the usb port hooked directly up to the FPGA, not the one plugged into the FT-LINK.
+baudrate=<baudrate> specifies which baudrate the computer should talk to the chip at. This must match whatever the chip was configured for. In our case, this is 921600 baud.
+no_hart0_msip specifies that we should not send a Machine Software Interrupt to hart0 or core 0. By default, after completing all reads and writes, UART-TSI sets the hart0 msip register to 1 which sends an interrupt to core 0 of the chip which tells the chip that we are done loading in the program and should jump to the address in the boot address register to start executing. Specify this argument if you do not want the core to boot up, such as when you are just doing read/writes.
+init_read=<Read Address> specifies that we should do a read at a given address before loading in our binary. This always reads a 32 bit word from memory and rounds down any address to the nearest multiple of 4. The address must be given in hex and be prefixed with 0x
+init_write=<Write Address>:<Write Value> specifies that we should do a write to a given address before loading in our binary. This always writes a 32 bit word to memory, rounds down any address to the nearest multiple of 4, and zero extends the write value to 32 bits. Both the address and write value must be in hex and prefixed with 0x
<bin> is the binary that you want to load onto the chip. This can be none if no binary is desired.
Task 1: Write down a sequence of uart_tsi commands that will turn on the LED attached to GPIO pin 0 and another sequence that will allow you to read the status of the button on GPIO pin 1. The GPIO register map can be found in the U540 Manual which can be found here: U540 Manual.
When the user manual specifies that GPIO bank can be configured “bitwise”, it means that each bit within a configuration register corresponds to a certain GPIO pin, eg bit 0 will configure Pin 0, bit 1 will configure Pin 1, and so on. If you have fewer GPIO pins than 32 in a bank, the other bits will always read zero and ignore writes.
Putting that all together we get this command to load the blinky binary we just built to the chip.
uart_tsi +tty=[YOUR_TTY] +baudrate=921600 build/d01/blinky.elf
Before running a program with uart_tsi, make sure to hit the reset button. While the read/writes will work just fine, the chip neeeds to be fresh out of the reset state in order to start running the loaded program correctly. If everything worked properly, you should see an LED flashing on the FPGA. Think back to the chipyard boot process and you might be able to figure out why.
JTAG Programming
JTAG is the other main programming interface on our chip and it is much more powerful than UART-TSI is, giving you full access into the internal state of the chip such as registers and program counters in addition to memory and letting you set breakpoints and single step a program for easier debugging. In fact, you can attach GDB to your chip and debug your program as if it were a desktop application with all of the features you would expect.
Debugging a chip with JTAG requires two programs, OpenOCD and GDB. OpenOCD is a program that abstracts away all the details of talking to every single chip and every single debugging probe and exposes a simplfied higher level of abstraction to programs that build on top of it like GDB. In our case, OpenOCD will handle talking to our FT-LINK USB JTAG adapter for us. To start OpenOCD, in a separate terminal run the following command:
openocd -f platform/labchip/labchip.cfg
If you get an error like the one below:
Info : clock speed 2000 kHz Info : JTAG tap: riscv.cpu tap/device found: 0x02d120dd (mfg: 0x06e (Altera), part: 0x2d12, ver: 0x0) Error: IR capture error at bit 5, saw 0x55 not 0x...3 Warn : Bypassing JTAG setup events due to errors Error: dtmcontrol is 0. Check JTAG connectivity/board power. Error: [riscv.cpu0] Examination failed Warn : target riscv.cpu0 examination failed Info : [riscv.cpu0] starting gdb server on 3333 Info : Listening on port 3333 for gdb connections Error: Target not examined yetThis is because OpenOCD is trying to connect to the FPGA’s JTAG instead of the FT Link JTAG. To fix this, just unplug the FPGA’s usb cable before you connect
This starts up OpenOCD using the chip specific settings we defined in our platform file and starts up some network sockets that other programs can connect to.
While you can use OpenOCD standalone to peek and poke registers and memory, the real benefit of JTAG comes when you use a higher level debugger. In a separate terminal run the follwing command:
$ riscv64-unknown-elf-gdb build/d01/blinky.elf
GNU gdb (GDB) 14.1
Copyright (C) 2023 Free Software Foundation, Inc.
License GPLv3+: GNU GPL version 3 or later <http://gnu.org/licenses/gpl.html>
This is free software: you are free to change and redistribute it.
There is NO WARRANTY, to the extent permitted by law.
Type "show copying" and "show warranty" for details.
This GDB was configured as "--host=x86_64-pc-linux-gnu --target=riscv64-unknown-elf".
Type "show configuration" for configuration details.
For bug reporting instructions, please see:
<https://www.gnu.org/software/gdb/bugs/>.
Find the GDB manual and other documentation resources online at:
<http://www.gnu.org/software/gdb/documentation/>.
For help, type "help".
Type "apropos word" to search for commands related to "word"...
Reading symbols from build/lab/d01/blinky.elf...
(gdb)
This starts up GDB that’s been built to understand RISCV opcodes, tells GDB what binary we want to be running and debugging, and drops us into a gdb shell.
Next, we need to connect to our actual chip and reset it. In the GDB console, run the following command:
(gdb) target extended-remote localhost:3333
(gdb) monitor reset
JTAG tap: riscv.cpu tap/device found: 0x00000001 (mfg: 0x000 (<invalid>), part: 0x0000, ver: 0x0)
Now we are connected to the chip and can issuing commands to debug the chip like so:
(gdb) x/8wh 0x80000000
To load the program onto the chip, we can use the load command:
(gdb) load
Loading section .text, size 0x3a08 lma 0x20000000
Loading section .rodata, size 0x680 lma 0x20003a08
Loading section .data, size 0x350 lma 0x20004088
Loading section .sdata, size 0x18 lma 0x200043d8
Start address 0x00000000200000a8, load size 17392
Transfer rate: 3 KB/sec, 4348 bytes/write.
From here you can either type run and let the program start or set a breakpoint. At this point you are in GDB and can treat it like any other debugging session.
Task 2 Set a breakpoint on the delay function. What value is the stack pointer when you enter the function? What address is the
mtime_startvariable at?
Task 3 Now that you’ve seen how to program the chips and how to write a basic program for bare metal, modify this program so the LED will only blink when the button is pressed. As a reminder, the button is hooked up to pin 1 of the GPIO bank. The U540 Manual may be helpful for finding which registers need to be set and read. Copy and paste this code into your final lab report appendix as a code block.
Idiomatic BaremetalIDE
Now that we’ve written some Baremetal code, let’s take a closer look at some other more idiomatic code that uses the drivers built into BaremetalIDE instead of doing everything from scratch. If you take a look at lab/d02/src/main.c, you should see a file like this:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "chip_config.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN PUC */
void app_init() {
GPIO_InitType gpio_init_config;
gpio_init_config.mode = GPIO_MODE_OUTPUT;
gpio_init_config.pull = GPIO_PULL_NONE;
gpio_init_config.drive_strength = GPIO_DS_STRONG;
gpio_init(GPIOA, &gpio_init_config, GPIO_PIN_0);
gpio_write_pin(GPIOA, GPIO_PIN_0, 1);
}
void app_main() {
gpio_write_pin(GPIOA, GPIO_PIN_1, 1);
msleep(100);
gpio_write_pin(GPIOA, GPIO_PIN_1, 0);
msleep(100);
}
/* USER CODE END PUC */
/**
* @brief The application entry point.
* @retval int
*/
int main(int argc, char **argv) {
/* MCU Configuration--------------------------------------------------------*/
/* Configure the system clock */
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
/* USER CODE BEGIN Init */
app_init();
/* USER CODE END Init */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1) {
app_main();
// return 0;
}
/* USER CODE END WHILE */
}
/*
* Main function for secondary harts
*
* Multi-threaded programs should provide their own implementation.
*/
void __attribute__((weak, noreturn)) __main(void) {
while (1) {
asm volatile ("wfi");
}
}
This may look intimidating but its really no more complicated than the blinky program we just looked at. In fact, this is just the blinky program that we just wrote, just refactored a little to use the library functions and look more like the examples. If you’ve ever done any work with the STM32 platform, things should look familiar. Most of the lines here are just comments that suggest where you should put different parts of your code to keep it organized. While this is a useful way of organizing things, there is no requirement to follow this convention, but it’s worth getting familliar with since most of exisitng code follows this discussion.
#include "main.h"
#include "chip_config.h"
The first two line simply include some header files. The first header, main.h can be found in the lab/d02/include folder. This just imports a bunch of standard libraries so things like printf and sleep will work and forward declares the functions that we are creating in our program.
The second header file imports the chipconfig.h header located in the platform/<CHIP> folder of the chip you have specified in CMake.
#ifndef __CHIP_CONFIG_H
#define __CHIP_CONFIG_H
#ifdef __cplusplus
extern "C" {
#endif
#include "riscv.h"
#include "clint.h"
#include "uart.h"
// ================================
// System Clock
// ================================
// system clock frequency in Hz
#define SYS_CLK_FREQ 16000000
// CLINT time base frequency in Hz
#define MTIME_FREQ 16000
// ================================
// MMIO devices
// ================================
#define DEBUG_CONTROLLER_BASE 0x00000000U
#define BOOTROM_BASE 0x00010000U
#define RCC_BASE 0x00100000U
#define CLINT_BASE 0x02000000U
#define CACHE_CONTROLLER_BASE 0x02010000U
#define PLIC_BASE 0x0C000000U
#define UART_BASE 0x10020000U
#define QSPI_FLASH_BASE 0x20000000U
#define DRAM_BASE 0x80000000U
/* Peripheral Pointer Definition */
#define UART0_BASE (UART_BASE)
/* Peripheral Structure Definition */
#define RCC ((RCC_Type *)RCC_BASE)
#define PLL ((PLL_Type *)PLL_BASE)
#define CLINT ((CLINT_Type *)CLINT_BASE)
#define PLIC ((PLIC_Type *)PLIC_BASE)
#define PLIC_CC ((PLIC_ContextControl_Type *)(PLIC_BASE + 0x00200000U))
#define UART0 ((UART_Type *)UART0_BASE)
#ifdef __cplusplus
}
#endif
#endif // __CHIP_CONFIG_H
This file defines the clock frequency the chip is running at which in turn controls things functions like sleep or setting the baudrate and defines pointers to all of our devices we can pass to our device drivers.
The next section of our code is the initialization function.
void app_init() {
GPIO_InitType gpio_init_config;
gpio_init_config.mode = GPIO_MODE_OUTPUT;
gpio_init_config.pull = GPIO_PULL_NONE;
gpio_init_config.drive_strength = GPIO_DS_STRONG;
gpio_init(GPIOA, &gpio_init_config, GPIO_PIN_0);
gpio_write_pin(GPIOA, GPIO_PIN_0, 1);
}
At a high level, all this code is doing is initializing the GPIO bank to output on pin 0 and setting pin 0 to high. The first line initializes a struct which contains all of the configuration settings of a peripheral. This is defined in driver/rocket-chip-blocks/gpio/gpio.h and is a pattern that is used for all Baremetal IDE drivers. The next three lines simply set the parameters, we want our pin to be output, our drive strength to be strong, and the internal pullup resistor to be disabled. After that, we call gpio_init function with our config struct as a parameter. In general, all Baremetal IDE drivers that access an MMIO peripheral follow the same pattern, where the first parameter is always a pointer to that peripheral. This pointer is defined in chipconfig.h so it can be used throughout your program. Since each GPIO pin within a bank can be configured individually, we also specify that we want to apply these settings to GPIO_PIN_0, a macro which is defined in gpio.h. Finally, we set pin 0 of the bank to 1.
Next, we have the function app_main which toggles the GPIO pin to flash it. This is essentially the same code we had in the previous example, only using the library functions. msleep takes the place of the delay function we previously wrote, sleeping for 100 milliseconds and automatically converting the time to machine ticks using the MTIME_FREQ variable defined in chipconfig.h.
void app_main() {
gpio_write_pin(GPIOA, GPIO_PIN_1, 1);
msleep(100);
gpio_write_pin(GPIOA, GPIO_PIN_1, 0);
msleep(100);
}
Finally we have the actual main function. This sumply calls the app_init and app_main functions which blinks our LED.
int main(int argc, char **argv) {
app_init();
while (1) {
app_main();
}
}
Below the main function, there is one last mysterious function, __main. If you have multiple HARTs in a system like on our taped out chips, all HARTs but hart0 will run this function instead of main. For now, this code simply tells each core to go to sleep until they recieve an interrupt.
void __attribute__((weak, noreturn)) __main(void) {
while (1) {
asm volatile ("wfi");
}
}
The CMakeLists.txt file is also updated to include all the files in the include directory
add_executable(hello
src/main.c
)
target_include_directories(hello PUBLIC include)
target_link_libraries(hello PRIVATE
-L${CMAKE_BINARY_DIR}/glossy -Wl,--whole-archive glossy -Wl,--no-whole-archive
)
To build this program, use the following command which should create a binary called blinky-2.elf
cmake --build ./build/ --target blinky-2
Task 4: If you read through current
chip_config.h, you’ll notice that it’s missing a definition for the GPIO header if you try and build, CMake complains about not missinghal_gpio.h. Update the chip platform files so that this demo compiles and load the demo onto the chip using your method of choice. Then add in your changes from Task 3 to only blink the light when the button is pressed, this time using the GPIO driver functions.
Task 5: Pay close attention to the blinking of the light, how does the blinking compare to the last program we ran and the nominal value of 5Hz we were targeting? Is it faster or slower that we would expect and what frequency does in approximatley seem to be flashing at? What might be causing this discrepancy? Hint, where do we tell our program how fast our chip is running? If you already fixed this in the previous step, you get a cookie*.
*Terms and Conditions Apply
UART and Console IO
UART, STDIO, and Baremetal IDE
When you are writing programs for your demos, you may want to communicate with the host processor to send out data, get user input, or so on. Baremetal IDE makes it really easy to use the UART to send text back and forth, implementing all the standard C console functions such as printf, puts, scanf, etc. The current chip configuration uses UART0 for stdio but this can be configurable if you have multiple UARTs.
printf and scanf are quite heavy in terms of code size, nearly 20kb each which may be an issue if you are trying to run your code from a chip’s scratchpad. This is only included if you use the substitution features of these functions so printf("hello world) will be small but printf("Hello %s", name) will be large.
lab/d03 contains a basic hello world program that prints “Hello World” to the console. We won’t go into too much detail here since it’s largely the same as the blinky example, but but we will pay special attention to the init function.
Any time you wish to use the UART, you MUST call uart_init to set the baudrate.
void app_init() {
UART_InitType UART_init_config;
UART_init_config.baudrate = 115200;
UART_init_config.mode = UART_MODE_TX_RX;
UART_init_config.stopbits = UART_STOPBITS_2;
uart_init(UART0, &UART_init_config);
}
This should be familliar to you now that you have seen the GPIO init code. The key parameter here is baudrate, or the rate that the data changes. You can kind of think of this as the bitrate of the UART, though that’s not completely true. This MUST be matched between your computer and your device, otherwise you will just recieve gibberish. Here’s a list of standard baudrates, while you can in principle choose any baudrate you want, a lot of softwre can only use these baud rates and some hardware won’t like arbitrary rates. The rest of the configuration bits don’t matter quite as much.
The chip baudrate is derived by setting a clock divider from the chip’s clock frequency which requires knowing the chip’s frequency. Make sure you have proerly fixed the issue described in Task 5 before starting this section.
| Baud Rate |
|---|
| 2400 |
| 4800 |
| 9600 |
| 14400 |
| 28800 |
| 38400 |
| 57600 |
| 76800 |
| 115200 |
| 230400 |
| 921600 |
When you are ready, compile the program with the following command to create the binary hello.elf
cmake --build ./build/ --target hello
Attaching a Console to UART
Before we load the hello world program onto our “chip”, we need to have a program on our PC which can recieve the text over UART called a Serial Console. There are many serial consoles available for Linux, MacOS, and Windows such as screen, minicom, RealTerm, and even VSCode itself, but today we will focus on screen since it is simple and widely available.
On this FPGA, we have mapped the UART to pins on PMOD header 1 which goes to the FTLink. The FTLink in turn exposes two usbTTYs, one used for JTAG and the other for talking to UART. To begin, find which serial device corresponds to the the UART of the FT Link Adapter. This should be the higher of the two devices that show up when you plug in the FT Link.
Once you have the serial port path, simply run the following command in a separate terminal window to connect to the UART where you replace XXX with the actual device number.
screen /dev/ttyUSBXXX 115200
The 115200 argument specifies the baud rate of 115200. If you omit this flag, screen will default to 9600 baud. You should now see an empty screen. This is a serial console and any characters that are transmitted from the chip will show up on the screen and anything you type will be sent to the chip over UART. A good sanity check at this point is to try type some random characters into the console at this point. Nothing should show up, but the RX light on the FT Link should start blinking, indicating you are transmitting data to the chip over UART. If you don’t see anything flashing, you have likely chosen the wrong serial port.
Finally, upload hello.elf using your method of choice in another terminal window and you should see your serial console fill with the phrase “Hello World”. If you instead see garbage characters such as �, make sure you have your baud rate set properly on both and SYS_CLK_FREQ is set properly for our chip (40MHz).
Task 6: Modify this hello world program to first ask for a name, wait for an input, and repeatedly print the string “Hello
!". While Baremetal IDE supports STDIO for input, output is currently not working properly so you will have to directly use the `uart_receive` function defined in `uart.c`. Copy and paste your code in an appendix code block and include a screenshot of the program waiting for input and while it's printing
Deliverables
Please upload a pdf containing your writeups for each task and include all code you wrote in an appendix separate from your main answers by Monday, 11/18, 11:59 PM.